文 | 来源·汽车之家 本站作者
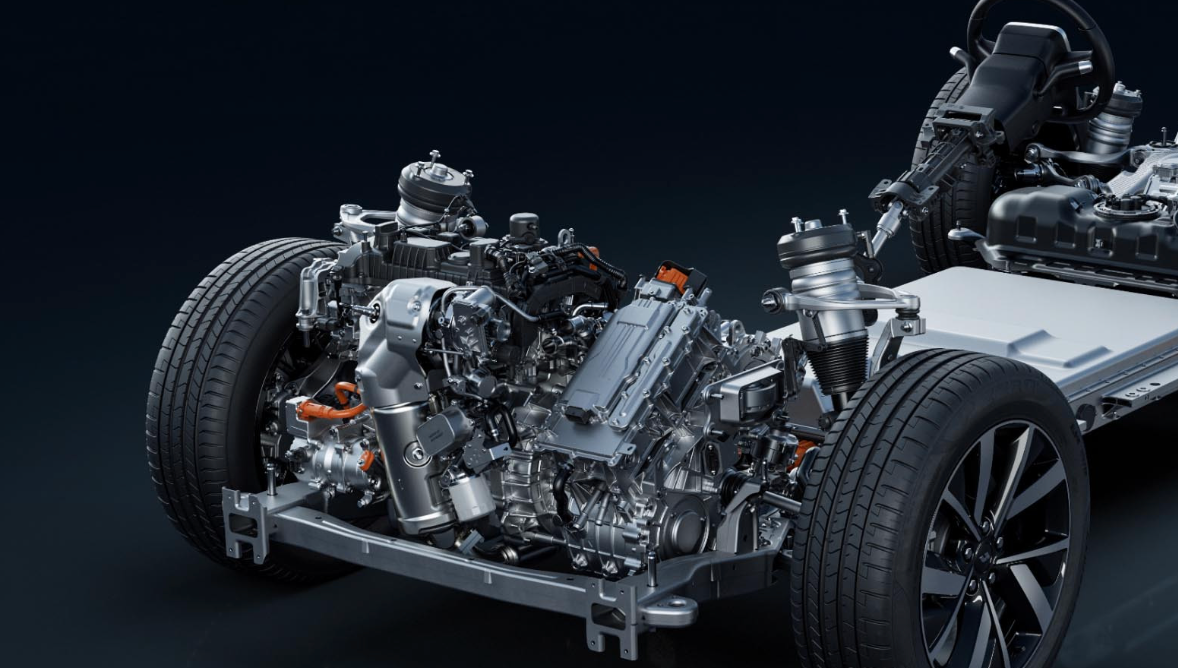
盖世汽车讯 如果想让汽车自动驾驶,最好有一张关于周围环境的详细图片。目前为止,业界一直青睐激光雷达的精度。在判断距离方面,基于摄像头的3D视觉系统比激光雷达差得多,而且在弱光或恶劣天气下经常表现不佳。

(图片来源:NoDar)
据外媒报道,初创公司NoDar基于摄像头的系统可以做得更好。在最近的测试中,该公司技术在各种场景(包括夜间驾驶和大雾)中的分辨率和范围始终优于激光雷达。特别是,它能够在两倍于激光雷达的距离内检测小物体,例如木材或交通锥。这对于在高速公路上高速行驶的车辆非常重要。
NoDar从两个相距较远的摄像头获取图像,然后比较这些视图以构造一个三角形,其中物体位于最远的顶点,然后计算一个物体的距离。这种立体摄像头设置众所周知,已被多家汽车供应商纳入高级驾驶辅助系统(ADAS)。
然而,该方法面临两个挑战。首先,两个摄像头必须进行精确校准,对于暴露在各种环境条件下的振动的汽车来说,这是很棘手的。NoDar首席执行官Leaf Jiang表示,通常这是通过精心设计的安装座来实现的,这些安装座可以使摄像头保持稳定,但需要将它们靠在一起。然而,摄像头之间的基线距离越小,对远处物体进行三角测量就越困难。
为了解决这一问题,NoDar开发出获得专利的自动校准软件。该软件允许将摄像头放置得更远,同时大大降低系统对不稳定因素的敏感度。通常情况下,摄像头校准需要在精心控制的环境中使用专门设计的视觉目标来完成,但NoDar的软件可以根据现实场景提示来进行校准,并且能够在每一帧上同步两个摄像头。Jiang表示,这样的计算非常复杂,但NoDar开发了高效算法,可以在现有汽车芯片上实时运行。因为将摄像头放置得更远,该系统可以对最远1000米的物体进行三角测量,该测距远超大多数激光雷达传感器。
另一个挑战是,与自身拥有光源的激光雷达不同,摄像头依赖于环境光,因此经常在夜间或恶劣天气下表现不佳。
为了解其系统在这些情况下的表现,NoDar在缅因州一个几乎没有光污染的偏远机场进行了一系列测试。该公司还与德国的一个汽车环境仿真室合作,以重现雨、雾等条件。研究人员使用一对间隔1.2米、配备30度视场镜头的5.4兆像素摄像头来收集数据,并将其结果与高端1550纳米汽车激光雷达进行比较。
在明亮的白天,NoDar的设备每秒可生成4000万个3D数据点,而激光雷达只能生成 60万个数据点。在暴雨环境中,有效数据点的数量仅下降30%左右,而激光雷达的下降幅度约为60%。在能见度约为45米的雾中,结果显示NoDar设备的测距准确率可达70%,而激光雷达的准确率仅为20%。
在夜间,该系统可以使用远光灯从130米外探测到一块12厘米高的木材,而使用激光雷达的话不到50米。如果是70厘米高的交通锥体,激光雷达的表现变化不大,但Nodar的技术可以在200米外发现它。
Jiang表示,汽车摄像头的性能正在迅速提高。目前的设备能够在非常弱的光线下工作,可以在肉眼看不到的雾霾场景中分辨出微小的细节。这也得到了该公司专有的立体匹配算法的补充。即使图像模糊,该算法也可以同步图像。因此,该系统可以在夜间使用更长的曝光时间来收集更多的光线,并且还能在雾天或雨天对模糊的视觉线索进行三角测量。
高德纳咨询公司(Gartner)分析师Guarav Gupta表示,因为使用的是现成的摄像头,该技术可能“成本更低、范围更远、分辨率更高,并且易于集成”。
但是,多伦多大学多伦多机器人和人工智能实验室主任Steven Waslander表示,汽车激光雷达可提供车辆周围360度的视图。在这方面将激光雷达与前置立体摄像头进行比较,可能不公平。如果想用多个立体系统复制360度视图,可能需要耗费更多的金钱和计算资源。
Jiang表示,NoDar技术有助于提升范围和分辨率,对于高速公路驾驶尤其重要。因为速度更快、制动距离更长,所以检测远处的物体变得更加重要。但是,Counterpoint Research市场调研机构的研究分析师Mohit Sharma指出,使用光学相控阵的新兴激光雷达传感器(例如Analog Photonics的片上激光雷达)可以实现更快的扫描速度。